
# 图
# 概括
由点的集合和边的集合构成
虽然存在有向图和无向图的概念,但实际上都可以用有向图来表达
边可能带有权值
难点
- 算法的步骤不难,难的地方在于数据结构比较复杂
- 相同的题目经常出现不同的数据结构来表达,所以一个算法可能不同题目有不同版本。
图示例
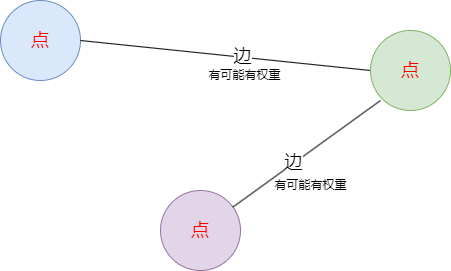
图-”森林“-示例
- ”森林“:存在多个图,多个图之间没有链接
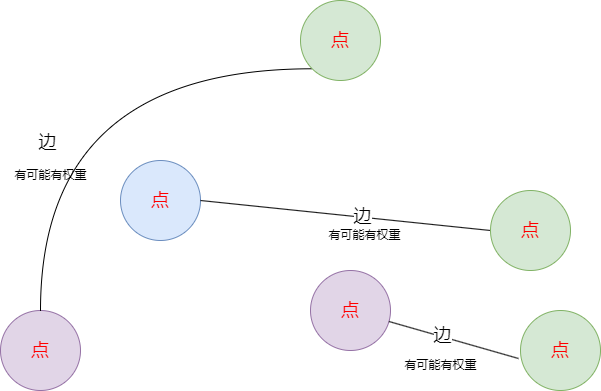
注意:图与二叉树的区别?
- 二叉树点之间的连接有严格的关系要求,如:子节点不可以从自身出发连接父节点
- 图的任意两个点之前都可以连接
# 无向图
以当前图为例子,任意连接的两点,从自身出发,都可以到连接的点,没有方向的要求,此时为无向图
# 有向图

上图表示有向图,点1可以到达点2,但是点2不可以到达点1
# 统一表示
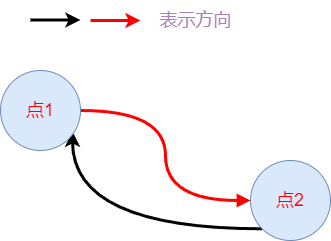
我们使用有向图的表达方式,在单向的表达上新增一个回去的方向,此时与无向图的本质一致。
# 图的常用表达方式
- 邻接表法
- 邻接矩阵法
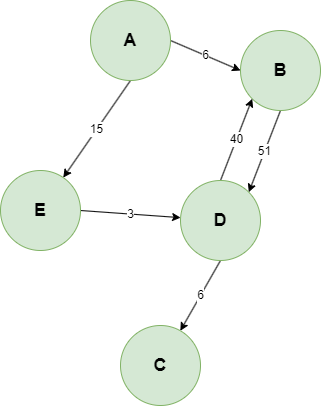
# 邻接表法
| 当前点 | 邻接点(点,权重) |
|---|---|
| A | (B,6) 、 (E,15) |
| B | (D, 51) |
| C | 无 |
| D | (C, 6)、(B, 40) |
| E | (D, 3) |
# 邻接矩阵法
- 横纵都为点
- 表格内容为点到点的权重
- ∞ 无穷表示,两点之间不相邻
| A | B | C | D | E | |
|---|---|---|---|---|---|
| A | 0 | 6 | ∞ | ∞ | 15 |
| B | ∞ | 0 | ∞ | 51 | ∞ |
| C | ∞ | ∞ | 0 | ∞ | ∞ |
| D | ∞ | 40 | 6 | 0 | ∞ |
| E | ∞ | ∞ | ∞ | 3 | 0 |
# 推荐数据结构
# 点
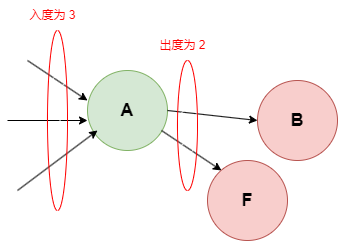
- 入度:可以到当前点的点数量
- 出度:当前点可以到的点的数量
- 直接相邻点:当前点可以到的点,在上图中则为 B、F
- 以当前点为出发点的线:在上图中为A到B、F的两条线
// 点的结构体
type Node struct {
Val int // 点的序号,可以是数值,也可以是 A,根据具体情况定
In int // 入度
Out int // 出度
Edges []*Edge // 以当前点为出发点的线
Nexts []*Node // 直接相邻点
}
1
2
3
4
5
6
7
8
2
3
4
5
6
7
8
# 线
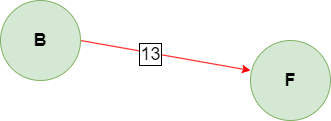
自身权重
出发点
目标点
// 边的结构体
type Edge struct {
Weight int // 权重,如图则为 13
From *Node // 出发点,如图则为 B
To *Node // 目标点,如图则为 F
}
1
2
3
4
5
6
2
3
4
5
6
# 图
- 图由点和边构成
- 点使用唯一编号 映射
- 边采用集合的方式表示
// 图的结构体
type Graph struct {
Nodes map[int]*Node // 点集
Edges map[*Edge]struct{} // 边集
}
1
2
3
4
5
2
3
4
5
# 数据结构转换
目前有一张图,关系如下图所示:
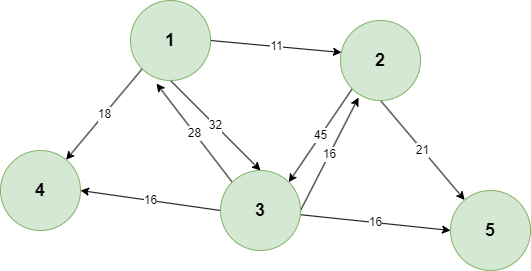
要求使用深度优先遍历与宽度优先遍历,来遍历这张图。
目前图的描述方式为一个二维数组,内容如下:
chart := [][]int{
// 第一个位置表示权重,
// 第二个位置表示出发点的值
// 第三个位置表示抵达点的值
[]int{11, 1, 2},
[]int{32, 1, 3},
[]int{18, 1, 4},
[]int{21, 2, 5},
[]int{45, 2, 3},
[]int{28, 3, 1},
[]int{16, 3, 2},
[]int{16, 3, 4},
[]int{16, 3, 5},
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
2
3
4
5
6
7
8
9
10
11
12
13
14
此时我们发现,我们之前说的数据结构体用不上了,那为什么要定好之前的数据结构呢?有什么好处呢?
答:好处在于,我们可以使用稳定的数据结构去学习图相关的算法,图相关的算法是不变的,但是图的表达形式千遍万化,我们不可能针对不同的数据结构都写一边算法。
那我们怎么使用之前的数据结构体呢?
答:我们只需要对不同的数据结构,写一个数据结构转换的函数即可,将不同的表达方式转换为我们熟悉的数据结构,并在我们熟悉的数据结构上实现算法。
以下针对本次例子的图,写一个数据结构体转换函数,内容如下:
func GenerateGraph(chart [][]int) Graph {
// chart 图的二维数组,原始表达方式
// 创建图,初始化图集,与边集
graph := Graph{map[int]*Node{}, map[*Edge]struct{}{}}
// 遍历原始数据,并进行数据转换
for _, v := range chart {
// 取出权重
weight := v[0]
// 拿到出发点
from := v[1]
// 拿到目的点
to := v[2]
// 如果图中的节点不包含,出发节点,则创建节点,加入点集
if !Contains(graph.Nodes, from) {
graph.Nodes[from] = &Node{Val:from}
}
// 如果图中的节点不包含目标点,则创建节点,加入点集
if !Contains(graph.Nodes, to) {
graph.Nodes[to] = &Node{Val:to}
}
// 拿到出发点
fromN := graph.Nodes[from]
// 拿到目标点
toN := graph.Nodes[to]
// 创建新的边
NewEdge := &Edge{weight, fromN, toN}
// 出发点的出度+1
fromN.Out++
// 出发点的直接邻点添加当前目标点
fromN.Nexts = append(fromN.Nexts, toN)
// 出发点的直接邻边添加当前边
fromN.Edges = append(fromN.Edges, NewEdge)
// 目标点的入度+1
toN.In++
// 图的边集加入当前边
graph.Edges[NewEdge] = struct{}{}
}
return graph
}
func Contains(set map[int]*Node, node int) (ok bool) {
_, ok = set[node]
return
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
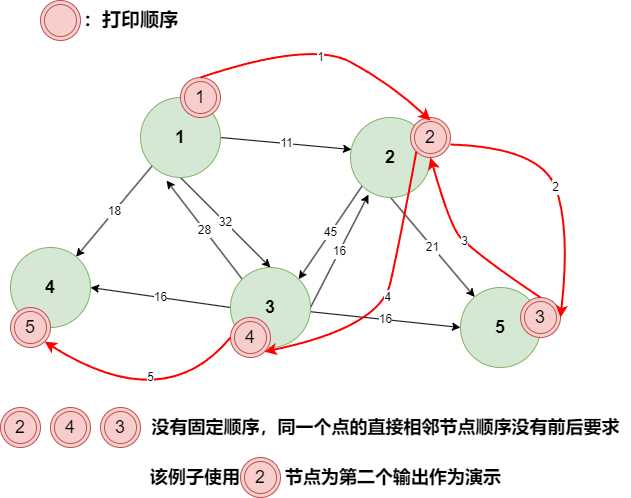
# 宽度优先遍历
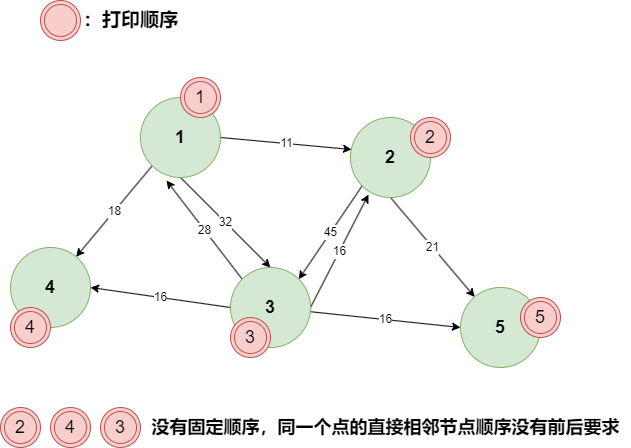
- 在图的宽度优先遍历中,同一个节点的直接相邻节点,之间的打印顺序,没有要求
- 在宽度优先遍历中,先打印当前节点,并将相邻节点加入队列中,从队列取出节点打印,然后继续将当前节点的相邻节点加入队列,一直循环知道队列为空
- 在图的数据结构中,两个点有可能互为直接相邻节点,所以需要预防死循环,需要加入set标记已经打印过的点
以下为宽度优先遍历的golang代码:
func GraphBFS(graph Graph){
// graph 是我们经过转换的图
// 创建队列
queue := list.New()
// 将1号节点放入队列中
queue.PushBack(graph.Nodes[1])
// 创建set标记加入过队列的节点
nodeSet := map[*Node]struct{}{}
// 标记1号已加入队列
nodeSet[graph.Nodes[1]] = struct{}{}
for queue.Len() > 0 {
// 从队列取出节点
node := queue.Remove(queue.Front()).(*Node)
// 打印该节点
fmt.Println(node.Val)
// 遍历直接相邻节点
for _, next := range node.Nexts {
// 如果该节点没有进入过队列,则加入队列,并在set中标记该节点已进入队列
if !Contains1(nodeSet, next) {
queue.PushBack(next)
nodeSet[next] = struct{}{}
}
}
}
}
func Contains1(set map[*Node]struct{}, node *Node) (ok bool) {
_, ok = set[node]
return
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
# 深度优先遍历
- 深度优先遍历,使用栈结构记录沿途的路径,对于遍历到的位置直接打印,打印后加入栈中,并标记。
- 循环从栈中取出节点,并遍历该节点的直接相邻节点,遍历过程中,如果遇到未进入过栈中的节点,则直接打印,并加入栈中,且跳出当前遍历
- 继续循环,以上步骤,知道栈为空,则遍历完毕
深度优先遍历的代码如下:
func GraphDFS(graph Graph) {
// set 标记打印过的节点
nodeSet := map[*Node]struct{}{}
// 创建栈,记录深度遍历的路径
stack := list.New()
// 打印当前节点
fmt.Println(graph.Nodes[1].Val)
// 栈中加入1号节点
stack.PushBack(graph.Nodes[1])
// set 标记加入过栈的节点
nodeSet[graph.Nodes[1]] = struct{}{}
for stack.Len() > 0 { // 栈不为空代表没有遍历完
// 取出栈顶节点
node := stack.Remove(stack.Back()).(*Node)
// 遍历栈顶节点,如果当前节点存在,则遍历直接相邻节点
for _, next := range node.Nexts {
// 如果直接相邻节点已经打印过了,则直接跳过
if !Contains1(nodeSet, next) {
// 没有打印过,则打印
fmt.Println(next.Val)
// 加入set标记已打印
nodeSet[next] = struct{}{}
// 遍历路径恢复,并退出
stack.PushBack(node)
stack.PushBack(next)
break
}
}
}
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35